The Context Why have drones perch?
Drones are massively useful tools in exploration and information gathering in otherwise difficult, dangerous, or costly to reach areas via manned aircraft. Thus as the applications of drones broaden, the variety of terrain they should be able to safely perch on increases. These new landing gear designs enable the vehicles to "perch” on contrary platforms such as branches and wires in addition to planar surfaces while using gravity to maintain stability.
 |
 |
The First Design Using Gravity for Actuation.
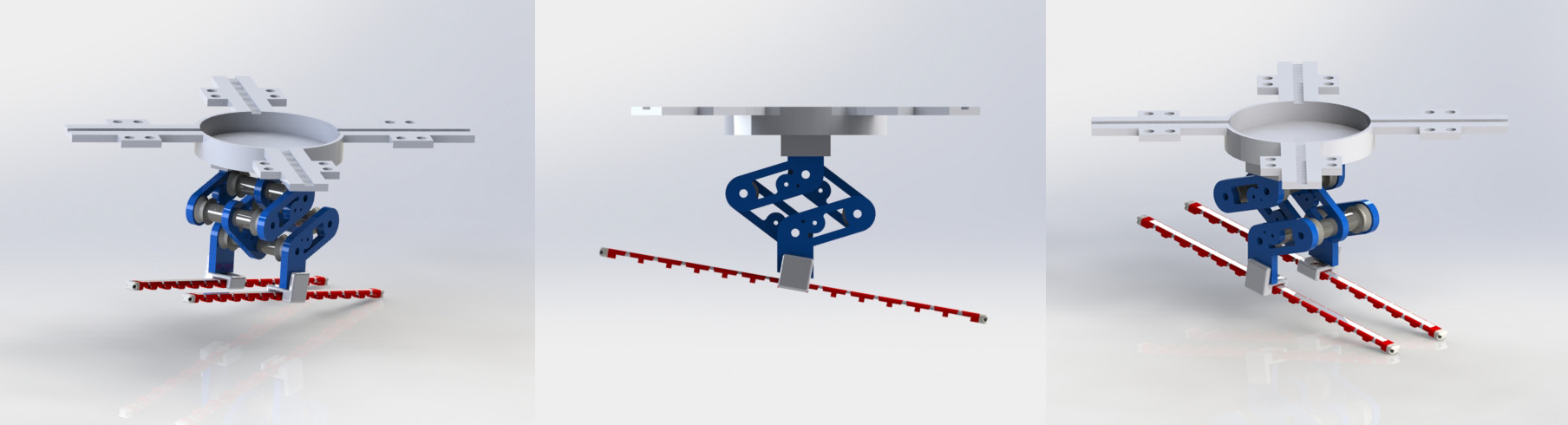
Inspired by the biomechanics of sleeping birds, this design utilizes the weight of the drone to collapse a four bar linkage with a cable running around three of the four joints and to the ends of four grasping digits. As the four bar collapses, it enlongates, causes the cable to be pulled in with the tips of the grapsing digits. The more the drone weighs, the tighter and more stable the grasp is.
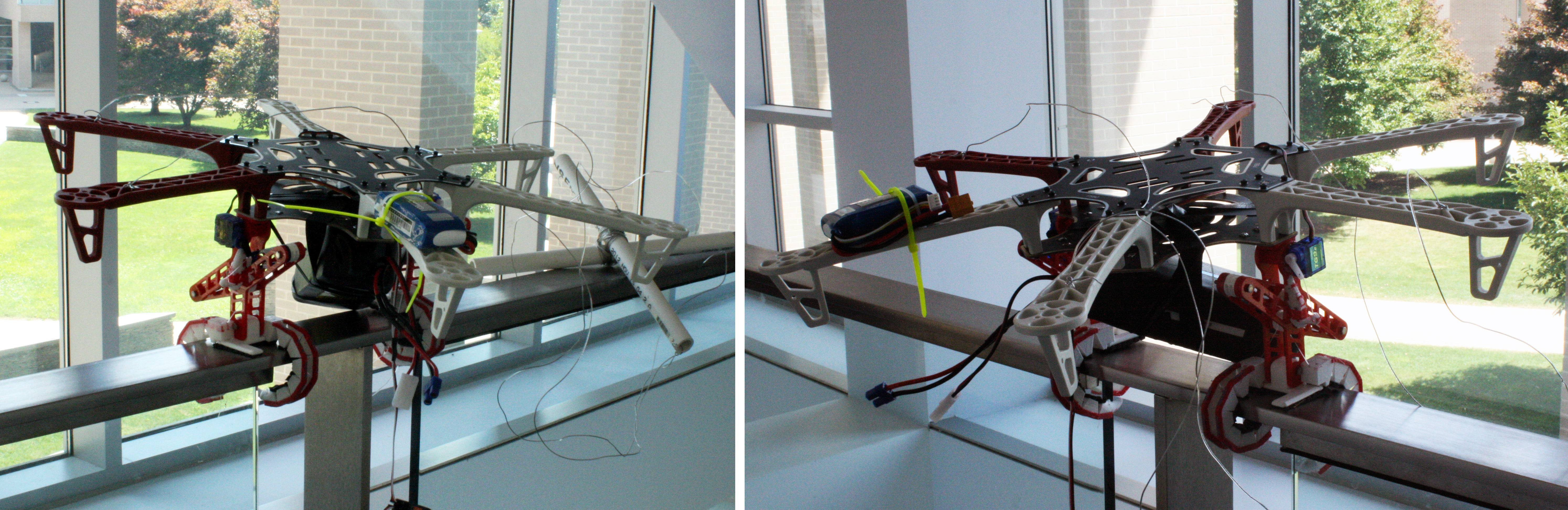
The drone used is the DJI FlameWheel F550, a UAV featuring 6 motors and a 5.5 meter diagonal wheelbase. When fully outfitted with electronics and motors, the drone weighs approximately 5 lbs. A three cell battery was used as a payload to simulate the weight of the electronics and motors on the chassis.
A jamming mechanism in the extended configuration of the four-bar directs the force vectors during landing to efficiently collapse the linkage. Fishing line was used as cabling due to its flexibility and low friction. These decreased resistances allow for the weight of the UAV to collapse and hold the linkages in place while at rest. Segmented 3D printed pulleys are located at each joint and prevent the fishing line from tangling about the four-bar. Since the cable runs around the four-bar’s horizontal pulleys twice, the four-bar's travel distance upon collapse is less than the true travel distance required to actuate the gripping digits.
 |
A servo on each leg of the landing gear controls a 3D printed lock, as shown in, that jams the landing gear when fully collapsed. The lock ensures that environmental disturbances will not cause the drone to tip off its perch and cause it to unintentionally loosen its grip. The lock is made out of ABS plastic and NinjaFlex. , which acts as a spring that keeps the mechanism in a default ``locked'' position (left). When the servos attached to the top four-bar segment are told to release, they pull on a stiff wire, lifting the hook out of the bottom four-bar segment and releasing the four-bar from a locked collapsed configuration (right). |
Inspired by Justin Thomas et. al and their work on a quick grasp mechanism based on the biomechanics of predatory birds, a servo motor was introduced between the chassis of the drone and the four-bar perching landing gear. The servo motor enables the drone to approach perches at a angle, eliminating the need for traditional vertical take-off and landing (VTOL). Controlling the angle between the perching landing gear and the drone chassis also enables the introduction of a gyroscope and a control mechanism for aligning the drone's (effectively an inverted pendulum) and the landing gear's centers of mass.
The two four-bars are attached to a hexagonal axle which is mounted to a housing for the servo motor using bearings. A gear on the axle meshes with a servo controlled gear. The servo motor housing is then mounted to the bottom of the FlameWheel using 3D printed standoffs with threaded inserts.
Another jamming mechanism is implemented to prevent the angle between the drone chassis and the landing gear from changing after the four-bars fully collapse. A clamp lined in polyester/vinyl foam mesh is pulled against the axle by cables running along the top three pulleys of each four-bar. The friction hold allows for a jamming mechanism that does not have discrete points like those of a pin.
The Grip Designing Underacted Grasping.
The legs of the UAV are equipped with four identical gripping digits that are 3D printed with ABS plastic filament making the rigid portions and NinjaFlex flexible plastic filament forming the spring spine. As the four-bar collapses and the cable pulls, the segments close to form a grip around the object. In order to prevent the segments at the digit tips from curling before grasping the target perch, modifications were made to actuate the segments closest to the base of the landing gear before the latter segments. The task is accomplished through two ways: a gradient of NinjaFlex along the digits and varying the height of each segment. By having the NinjaFlex thinned out near the base of the landing gear allows those segments to actuate first with less resistance. Making the digits higher close to the base of the landing gear increases the distance between the pivoting NinjaFlex and the fishing line which applies the force, effectively increasing the torque and making the pull more effective.

To further improve the effectiveness of grip, each of the bottom facing surfaces are outfitted with a pad of polyester/vinyl foam mesh. This is a RoHS compliant material that is water, bacteria, and flame resistant and used commonly to increase friction between surfaces intended to resist motion. Additionally, the angles between the segments are optimized to increase the surface area of the bottom facing surfaces while maintaining their geometry, boasting greater contact points.
A simulation of the digit actuation during the collapse of the four-bar was created using a MATLAB model. The model is based on the LaGrangian equation of motion for the four bar linkage, acted upon by gravity, shown below.
Where m4 is the mass of the bar connecting to the drone, m3 and m2 are the masses of the intermediate bars, l2 is the distance between the pivots on the intermediate bar, d is the distance from the center of mass of the intermediate bar to the lower pivot, g is the acceleration due to gravity, and I is the rotational inertia of the intermediate bar. The intermediate bars are the bars that connect the bar mounted to the drone with the bar attached to the palms. This equation has only one variable, theta while the m, d, g, I and l parameters are held constant. Theta is defined as the angle between the horizontal and the intermediate links.
The parameters for the grasp are based on empirical data from experiments using the 3D printed digits. The simulation calculates coefficients for cubic equations for each joint in the digit. The curvature of the digit is based on the distance between the two ends of the four-bar linkage. As the linkage closes, the two ends stretch and pull the fishing line running through the digit. The links in the digit do not close at the same rate as each junction has its own equation of motion.
The Performance Stability and dexterity of perch.
Stability and dexterity tests were performed with the angle actuating four-bar landing gear. An empty FlameWheel F550 frame was weighed down with a three cell battery to emulate the payload of electronics and motors. A marionette test was performed by vertically lowering the drone onto a 2x4 block of wood. During this test the landing gear was able to grasp the perch and the locking mechanism kept the linkage collapsed. The grip was strong enough such that the drone was able to be lifted while it kept the 2x4 block firmly in its grasp. The servo motor on board enabled for small adjustments for the balancing of the drone.
Marionette tests were performed with a static version of the four-bar landing gear on a PVC pipe, a branch, a stone ledge, and a handrail. With the angle between the FlameWheel F550 chassis and the four-bar linkage fixed, the drone was able to perch without tipping during VTOL.


All four dexterity tests were successful and the drone, if landed correctly was able to grip and balance upright on the perch. The vinyl/polyester foam padding provided sufficient friction to prevent slipping on the PVC pipe and stone ledge perches. Despite reaching two digits over the stone ledge and grasping onto the side of the wall while the remaining two digits remained on the level surface of the stone divider, the landing gear remained at rest and the grasping forces against the side wall did not destabilize the perch. The compliant digits were able to wrap around irregular surfaces of the branch and hand rail as well as the flat, orthogonal surfaces of the stone ledge.

The static configuration of the four-bar landing gear was mounted onto a fully functional DJI FlameWheel F550 and manual flight tests were conducted. Similar to how to marionette tests relied on aligning the palms over the perch before letting the UAV's weight to collapse the linkage, the manual control was not precise enough to perch the UAV onto the branch. Attempts to perch the UAV resulted in the landing gear being unaligned with the branch and the drone missing the perch. A take-off test was successfully conducted from a resting perched position with the drone releasing the branch and entering flight, as shown in \Fref{fig:takeoff}. The weight of the perching landing gear in addition to the weight of the traditional static landing gear was easily carried by the drone.
The Scalability In this Age of Minis.
Advancement in technology have allows for batteries and other electronic components to decrease in size and weight while maintaining efficiency, enabling the miniaturization of UAVs. These smaller UAVs are often more discrete, maneuverable, and cost-effective than their larger counterparts. The greatest limitation in outfitting these smaller drones with appropriate landing gear is the weight load constraint of the UAV. The Flamewheel F550 has a maximum takeoff weight of 1200-2400g. 500g is taken up by the weight of the frame, so its maximum payload is 700-1900g. The Dromida Ominus, a 100 gram 4 rotor recreational UAV with a 238 mm diagonal span, can only take off with 60g of extra weight beyond its frame, based on experiments. Due to these load bearing restrictions, the landing gear must be scalable in order to be universally applicable. The design decisions made for the miniature four-bar landing gear were primarily to decrease the size and weight of the landing gear.
To decrease the weight for the miniaturized landing gear, the legs of the linkage were shortened to approximately 1 inch long, and leg is comprised of a single four-bar. Additionally, rather than making two individually actuated legs, a single, wide leg with two separated feet was used. Each ``foot" has two opposite-facing compliant gripping digits. Unlike their larger counterparts, these digits are comprised mainly of flexible NinjaFlex filament and minimal ABS. The thickness of the NinjaFlex increases from the center to the tips of the fingers, to make the the fingers close from the center outward and increase the surface area in contact with the landing spot.
Because the diagonal length of the Dromida Ominus is significantly smaller than that of the Flamewheel, the feet can also be closer together. By decreasing the length of the links, the length of this inverted pendulum is decreased, making it more stable.
The Second Design Using Hooks to Perch.
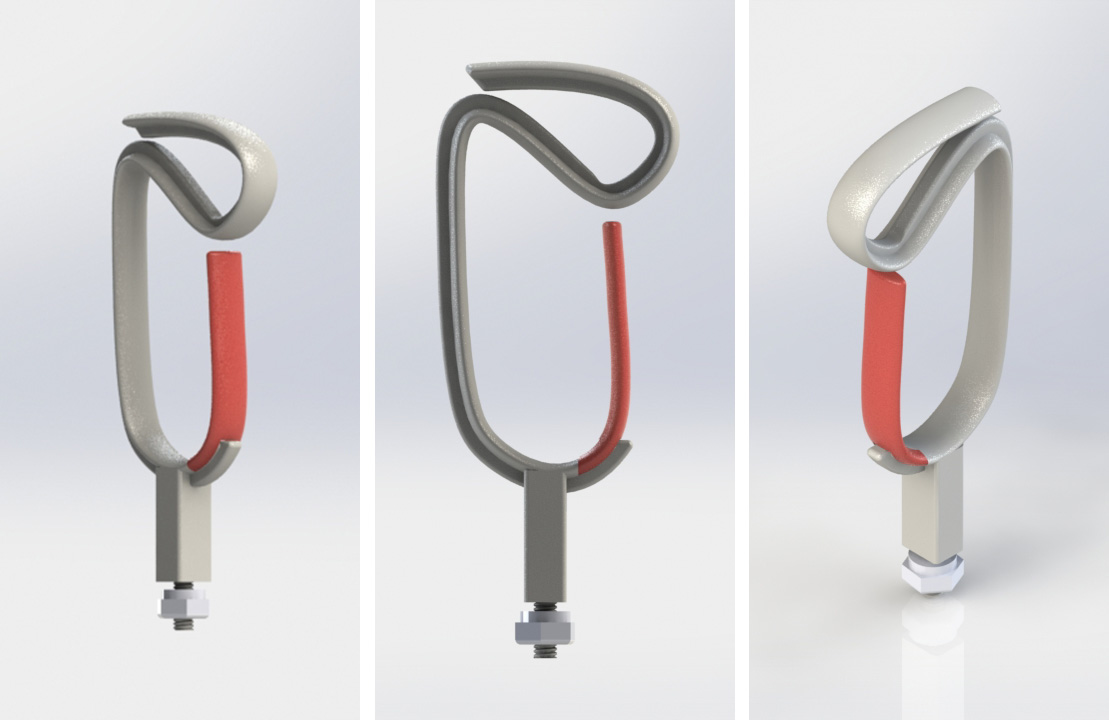
The abundance of telephone wires in the average American urban environment provides the possibility of creating a landing gear that allows the drone to hang on a cable and take off. Previous landing gear was developed by Joseph L. Moore for fixed wing drones to perch and possibly charge on power line cables.

Using the MakerBot 2X, the hook design is 3D printed using ABS and NinjaFlex filaments. The design incorporates a curved upper part to let the wire be inclined to slip into the hooked part in the situation where the drone slightly misses the wire. A T-spline is created to provide more structural support to the hook. Due to the simplicity of the design and the low cost of manufacturing, the hook is easily scalable and applicable to drones of various sizes.
Other Projects